Dynamical Systems Theory
Introduction
By Pooja Patnaik & Jeremy Jostad
We
live in a world of systems. The natural environment is comprised of
multiple
types of systems, such as ecosystems. The human body is a system
comprised of
many interdependent parts (organs, tissues, cells, etc.) that work
together
which allow us to eat, sleep, and walk on a daily basis.
Whether you think of systems in the
biological, social, physical, or psychological realm, the fundamental
principles are the same. Systems are
complex entities that are comprised of multiple working parts that
interact with
one another to produce behavior (phenomena) that cannot be explained
solely by
the individual parts alone. We can
use these principles beyond the physical or biological realm and apply
them to
what we, as social psychologists are interested in, human behavior. But what are dynamical systems, you may
ask?
First,
consider the word dynamic, which simply means change over time. It seems reasonable to assume that
systems are not static because even small changes in one component of a
system
can create large changes in the behavior of the system.
However, we are scientists, and we are
interested in the ability to measure and predict the behavior of
systems. Welcome mathematics!
Add an “al” to “dynamic” and you have
“dynamical,” which refers to the use of mathematics to measure and
model the
changes within a system over time.
Therefore, dynamical systems theory uses mathematical equations
to
specify and predict the time-based properties of system phenomena. Fundamentally, it is the patterns of
behavior, or the “spatio-temporal dance,” in which we are most
interested in
understanding. You may be asking
yourself, “great, but how is this any different than traditional
methodologies?”
Dynamical
systems theory is an interdisciplinary theory that combines many
different
theories, including chaos theory and catastrophe theory.
Chaos is a seemingly random and completely
unpredictable behavior.
Statistically, chaos and randomness are not different. Examples of chaotic systems include
physical (weather), social, and economic systems (stock market). To be discussed later, the logistic map
equation is a simple mathematical formula that ultimately leads to
chaotic
behavior.
Chaos
is
commonly referred to as “a state of disorder”. As
a result, it makes sense that chaos is where the ability
to predict is limited. Entropy is
the ability to predict what is next, based off of everything one knows
from
before; therefore chaos has low entropy since its ability to predict is
limited. In the real world, we
usually do not know the state of the world precisely, but only
approximately. For example, we can
determine a lot about today’s weather by measuring temperature and
pressure at
a number of locations in the world.
But this does not give us complete information- we do not know
the
velocity or position of every single molecule in the atmosphere. Chaos theory studies the behavior of
dynamical systems that are highly sensitive to initial conditions- an
effect that
is popularly referred to as the butterfly effect. The
question is if the flap of a butterfly’s wings in Brazil
sets off a tornado in Texas. The
flapping wing represents a small change in the initial condition of the
system,
which causes a chain of events leading to large-scale phenomena. Had the butterfly not flapped its
wings, the trajectory of the system might have been vastly different.
![]()
![]()
Now
that you have an understanding of
chaos, see if you understand Sheldon’s explanation, below:
http://www.youtube.com/watch?v=eqZyn3I46aM
Catastrophe
theory is the study of behavior that has sudden shifts or changes in
behavior.
In doing so, catastrophe theory has been able to explain, for example,
how
sudden abrupt changes in behavior can result from minute changes in the
control
factors and why such changes occur at different control factor
configurations
depending on the past states of the system. Consider,
for example, opening a door that is jammed. As
increasing pressure is applied,
nothing happens, and the door remains stuck. However,
at some point, a miniscule increase in pressure
will cause the door to become unstuck.
The transition from stuck to unstuck or jammed to un-jammed, is
a
catastrophe.
Remember
that we are interested in the overall macroscopic or emergent behavior
of the
system. Using ecosystems as an
example, we cannot understand how all of the parts of an ecosystem work
together to produce a healthy habitat if we are solely focused on the
cellular
structure of a plant. As system dynamists,
we assume there are multiple components within a system that both
constrain and
produce macroscopic emergent behavior.
We are not concerned with trying to measure every component of
the
system. Rather, we believe a
system is best understood by taking a step back and observing the
system as a
whole. The traditional research
paradigm takes a reductionist approach, by seeking to break the system
into
individual parts to see how each part influences one another. As the reductionist scientist continues
to break down the system, they become increasingly detached from the
behavior
under study. A second difference
from traditional methodologies is the non-linear nature of systems. Systems do not behave in a linear
fashion. Traditional statistical and analytic strategies, however,
model
behavior as though it were linear.
As we will see throughout this website, system behavior can be
relatively stable with large changes within its components, and on the
other
hand we can see extremely dynamic behavior by small changes within the
components
of a system. Using equations with
non-linear terms will help in measuring and modeling system behavior.
Before
moving forward any further, let’s discuss some of the fundamental
assumptions
of dynamical systems theory. These
will be terms and ideas that create the building block of inheriting a
systems
framework.
Emergence
and Self-Organization
Emergence
is a fundamental assumption of dynamical systems theory which suggests
that the
interaction of the components of a system produce a pattern of behavior
that is
new or different than that which existed prior. Emergence
happens every day in our lives. We can
see, feel, and touch emergent
phenomena. Weather is a great
example of emergent phenomena. A
hurricane does not simply occur on its own; rather, certain
interactions of
weather components (temperature, wind, moisture, etc.) interact to
produce this
phenomenon. The logical question
to ask is “how does emergence occur?”
As stated above, it is the interaction of the components within
a system,
however, the notion which specifies how these components interact is
known as
self-organization.
Self-organization
is the process by which emergence occurs.
There is not an acting agent within the system that specifies
how the
components should interact with one another; rather, the interactions
are
governed by feedback loops. Several
key concepts and conditions are important for self-organization in
systems:
1)
Interactions
within systems must be non-linear.
Patterns emerge because of the different
types and levels of interactions that can occur between the components
of the
system.
2)
A
system
must be far from equilibrium. This
means that a system must be an
open system and not a closed system.
Although closed systems really only occur in a vacuum, the idea
is
important. Systems must have a
constant flow of energy in and out of the system. If
this does not occur, then a system would find its
equilibrium and essentially die.
In social psychology, we often refer to this “energy” as
information.
3)
Systems
exhibit hysteresis, which literally
means “history matters.” The future state of a system will depend on
the past
and present states.
4)
Circular
causality
is present in systems. The pattern
(emergence) is restricted by the behavior of the components of the
system, but
the components of the system are also restricted by the global patterns.
5)
Fluctuations
or perturbations
are constantly trying to move the
system, which will provide an understanding of the stability of various
phases.
These perturbations should not be misinterpreted as error.
6)
The
slaving principle acts as a selection
mechanism for the interaction of the parts of the system (Kelso, 1995). That is, once the order parameter (see
below) is fully developed and rather stable, it “enslaves” the parts of
the
system into specified interactions.
To
understand how emergence and
self-organization operate, consider the Raleigh-Benard instability, a
classic
example of emergence through self-organization.
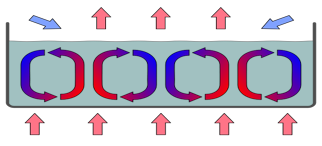
The
Raleigh-Benard Instability
The
Raleigh-Benard instability demonstrates the emergent behavior or
spatio-temporal dance of a liquid when heated from the bottom. Consider a pan with oil inside that is
not being heated. If the
temperatures within and surrounding the liquid are the same, the
molecules are
moving about randomly. However,
when a source of heat is added to the bottom of the pan, the movement
of these
molecules begins to change. The
molecules that are near the bottom of the pan are warmer and will rise
to the
top of the surface of the liquid. The cooler molecules are denser and
will sink
to the bottom of the liquid. At a
particular temperature gradient (difference in temperature between the
bottom
and top of the pan) a pattern emerges within the liquid that is
developed by
the movement of the molecules (the components of the system). Convection cells within the liquid
emerge that create a rolling motion opposite of one another (see Figure
1
below). Through this motion,
hexagonal cells emerge in the liquid.
Thus, the spatio-temporal pattern of the liquid changes as the
molecules
transition from a state of disorder into a coordinated whole. At a particular temperature gradient this
spatio-temporal dance will remain stable and continue.
However, if the temperature gradient
continues to increase, the liquid becomes turbulent and transitions
into a
state of disorder. The Raleigh-Benard
instability shows that complex patterns can emerge through the
self-organization of the molecules in the liquid. To
understand how this system works, do we need to know the
pattern of every molecule in the system?
Hopefully you said no, because it is the pattern of the liquid
in which
we are interested.
Figure
1
Click
on the link below to watch the Raleigh-Benard
Instability in motion:
http://www.youtube.com/watch?v=kJnE12dJ9ic
Sensitivity
to Initial Conditions
An
important concept to dynamical systems is the notion that non-linear
dynamics
are sensitive to initial conditions.
That is, small initial differences in initial conditions or
measurements
can lead to vast differences in long-term predictions.
This is one of the defining ideas of
chaos (Mitchell, 2009) and may best be shown through the logistic map
equation. The equation is as follows:
xt+1
= Rxt (1-xt)
where
xt is the current
value of x and xt+1 is the value at its next step; R is a
constant. What this fairly simple
equation suggests is that small changes or differences in the value of
the
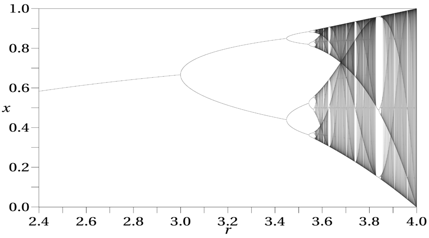
constant (R), can have dramatic changes in the long-term behavior. Figure 2 shows a bifurcation diagram for
the logistic map. What can be shown
here is that fixed points (the straight line in the figure) are reached
when R
is below about 3.1. At a value of
3.1, the map creates what is called a bifurcation.
The predicted value now oscillates between two values. When R reaches a value between 3.4 and
3.5, the period bifurcates again and now the future value oscillates
between
four different values. The higher
we raise the value of R, the periods continue to double until they have
reached
a chaotic state (which begins when R is approximately 3.569946). These bifurcations represent a phase
transition in the state of the system.
Figure
2
A
very fun tool can be used to model
the logistic map at the following link:
http://old.psych.utah.edu/stat/dynamic_systems/Content/chaos/index.html
Phase
Transitions
A
phase
transition is the transformation of a thermodynamic system from one
phase or
state of matter to another one. A
phase space of a dynamical system is the collection of all possible
states of
the system in question. A phase
transition occurs as a result of some external condition, such as
temperature,
pressure, etc. For example, a
liquid may become gas upon heating to the boiling point, resulting in a
change
in volume. The measurement of the
external conditions at which the transformation occurs is termed the
phase
transition. The term is most
commonly used to describe transition between solid, liquid, and gaseous
states
of matter.
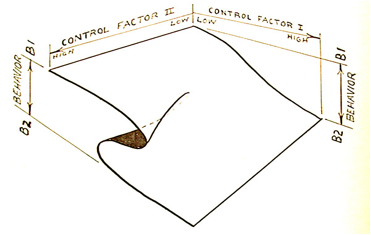
One
way that phase transitions can be applied is by studying cusp
catastrophe
models. The cusp catastrophe model
is one of many catastrophe models, which has been applied several times
in
psychology from areas ranging in binge drinking with attitudes towards
alcohol,
to speed-accuracy trade-offs, and a general model of attitudes. The model describes how changes in a
dependent variable, like behavior, are related to the levels of two
independent
variables. It is a mathematical
model in which a system can sometimes show a smooth changing behavior
and other
times show stable states. These states
tend to be resistant to change while the smooth behavior tends to
function more
fluidly. There exists two stable
states and is generally a function of control parameters.
The only stable locations for behavior
are assumed to be on the surface.
Hysteresis plays a role in that it refers to the predicted
tendency for
behavior to resist change in spite of the two independent variables’
effect on
it. Going back to phase
transitions, this means that when experimental settings continuously
change and
force people to switch from one independent variable to another, the
switch
will be abrupt.
Figure
3
Characteristics of Dynamical Systems
Stability
Dynamic
systems try to achieve and maintain a stable state.
When a system is pushed far from equilibrium in seeking
stability, it adopts certain patterns which try to achieve local
stability. The local stability is reached
with the
use of order parameters and control parameters. Stability
is a resistance to perturbations, which are small
changes to or disturbances in the system.
The stability of a system can be measured in several ways. First, stability is indexed by the
statistical likelihood that the system will be in a particular state
rather
than other potential states.
Second, stability can be measured depending in how it responds
to
perturbation. If a small
perturbation applied to the system drives it away from its stable
state, after
some time the system will settle back to its original position. Third, stability is related to the
system’s response to natural fluctuations within the system. In systems theory, a system in a steady
state has numerous properties that are unchanging in time.
You might already be familiar with homeostasis,
which is the property of a system, either open or closed, that
regulates its
internal environment and tends to maintain a stable, constant condition.
Order Parameters
Order
parameters define the overall behavior of a system by enabling a
coordinated
pattern of movement to be reproduced and distinguished from other
patterns. Order parameters are the
phenomena in
which we are seeking to understand.
Phase transitions occur when order parameters change as a
function of another
parameter of the system, such as temperature. An
order parameter is a measure of the degree of order
across the boundaries in a phase transition system.
For liquid/gas transitions, the order parameter is the
difference of the densities. When
a control parameter is systematically varied (i.e. speed is increased
from fast
to slow), an order parameter may remain stable or changes it stable
state
characteristic at a certain level of change of the control parameter.
Control
Parameters
Control
parameters are responsible for changing the stability of states. A control parameter does not control
the change in behavior but rather acts as a catalyst for reorganizing
behavior. The control parameter does not
really
“control” the system in traditional terms. Rather,
it is a parameter to which the collective behavior
of the system is sensitive to and thus, moves the system through
collective
states. Control parameters lead to
phase shifts by threatening the stability of the current attractor. Control parameters are similar to
moderators within psychology.
Subsequently, systems are concerned about how other variables
moderate a
variable’s relationship with itself.
In the Raleigh-Benard instability discussed earlier, heat is a
control
parameter as an outside variable pushing the system into different
behaviors.
State
Space
A
state
space is an abstract construct which describes the possible states of
the
collective variable. For example,
the behavior of a simple mechanical system, such as a pendulum, can be
described completely in a two-dimensional state space where the
coordinates are
position and velocity and as the pendulum swings back and forth, its
motion can
be plotted on a plane. The motion
of the pendulum has a path through the state space that tracks its
regular
changes of position and velocity. State spaces can also be constructed
in three
dimensions.
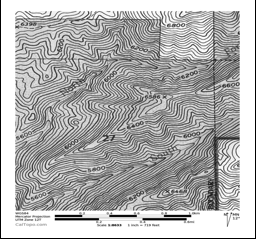
Topology
is the graphical representation of differential equations in
three-dimensional
space. Topology is generally
displayed as an elevation map of some geographical terrain and can be
applied
more generally to describe anything, like behavior or psychological
constructs
that change over time. Control parameters have the ability to alter
topological
features in one of three ways.
First, they can strengthen/weaken an attractor or repeller
(scroll down
for definitions). Second, control
parameters can move a set point to a different location relative to
other set
points. Third, control parameters
can drastically change the topology by completely extinguishing set
points or
turning it into a different kind of topological feature (e.g. change an
attractor to a repeller or vice versa).
Figure
4 is a picture of a topographic
map near the University of Utah.
Not only does this map measure distance and direction on the X
and Y
axis, but it also measures elevation through the lines.
Thus, it represents a three dimensional
space. Imagine that the X and Y
axis represented different constructs.
Now imagine that a person was placed somewhere in this
geographical
terrain. Most likely this person
is going to travel in the path of least resistance, down-hill or on
relatively
flat terrain. The same can be said
of the state of the system when using topography. That
is, depending on where the current state of the system
resides, a topology can tell us the most likely future dynamics of the
system. Valleys can represent attractors,
whereas hills and peaks can represent repellers, which will be
discussed next.
Figure
4
Patterns
of Behavior in the System
A
critical property of self-organizing, open systems is that, although an
enormous range of patterns is theoretically possible, the system
actually
displays only one or a very limited subset of them.
A dynamical system is generally described by one or more
differential or difference equations.
The equations of a given dynamical system specify its behavior
over any
given short period of time.
Attractors
In
dynamical systems, an attractor is a set of physical properties toward
which a
system tends to evolve, regardless of the starting conditions of the
system. Attractors draw the system
toward this state space. If we
consider a graph that represents change in the system, an attractor
will have a
negative slope. A less steep slope
indicates that points are moving towards the attractor slower. Think of it as attraction- when you are
attracted to someone, you are drawn in by them. A
fixed point attractor is in two dimensions which can be
thought of as a combination of two people’s behavior drawn together (as
if both
of the people below are running towards each other).
In 3D, you find spiral attractors (more below).
![]()
![]()
![]()

Repellers
If
a set
of points is periodic or chaotic, but the flow in the neighborhood is
away from
the set, the set is not an attractor, but instead a repeller. Repellers are more theoretical, rather
than observed as they serve as boundaries between attractors. Graphically, a repeller has a positive
slope. A steeper slope indicates
that the points are moving away faster.
Taking the analogy from above, if you are ‘repulsed’ by someone,
you try
to move away from them. A fixed point
repeller is in two dimensions as well where you can think of it as a
combination of two people who are repulsed by each other (as if both of
the
people below are running away from each other). Similar
to attractors, in 3D, you find spiral repellers.
![]()
![]()

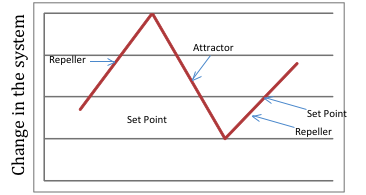
Set
Points
A
set
point is where all behavior in a system is depicted in relation to this
point. Attractors move towards the
set point whereas repellers are driven away from this point. These are generally points of no
change. When dealing with
oscillations, it is the point the system oscillates around (remember,
the point
of zero change).
Figure
5
Periodicity
Periodicity
of the system measures the manner in which a system returns regularly
to the
same state (or similar state) because of a pattern that repeats ad
infinitum. Periodic behavior can be
defined as
recurring at regular intervals, such as “every 24 hours”; the amount of
time it
takes to complete one cycle is a period.
Earlier, we talked about chaos’ low entropy due to its limited
predictability; therefore periodicity has high entropy since there’s a
high
ability to predict the future since there is a repeated pattern. A dynamical system exhibiting a stable
periodic orbit is often called an oscillator. An
oscillation is a repetitive variation between two or more
different states, like a swinging pendulum.
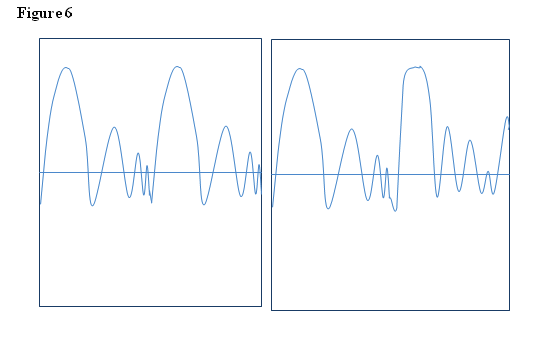
Quasi-periodicity
is the property of a system that displays irregular periodicity, so it
is a set
that nearly repeats. Take a look
at the graphs in Figure 6. The
graph on the left displays periodicity in that the same pattern will
repeat
forever if nothing stops the movement, and the graph on the right
displays
quasi-periodicity because the oscillations may be similar, but they’re
not
exact. The repetition is not
perfect like a periodic system but it has similar repetitions. Quasiperiodic behavior is a pattern of
recurrence with a component of unpredictability that does not lend
itself to
precise measurement.
Figure
6
Limits
Limit
cycles have been used to model many real world oscillatory behaviors
over
time. A pendulum that is not
affected by friction will repeat its oscillations forever, which is
known as a
limit cycle, since the system changes in a constant repetition, but
does not
necessarily repeat the same value every time. Stable
limit cycles imply self-sustained oscillations: the
closed trajectory describes perfect periodic behavior of the system. Any small perturbations from this
closed trajectory cause the system to return to the limit cycle.
Combining
limit cycles with other elements allows for many other possibilities
that
expand the topology. For example,
spiral attractors (spiraling towards the set point in time) occur by
combining
a fixed point attractor with a limit cycle. Similarly,
a spiral repeller is where a fixed point repeller
is combined with a limit cycle.
A
limit
set is the state a dynamical system reaches after an infinite amount of
time
has passed, and is important because they can be used to understand the
long-term
behavior of a system. Attractors
are limit sets but not all limit sets are attractors.
For example, if a pendulum is losing its speed and point X
is minimum height of the pendulum and point Y is the maximum height,
point X is
a limit set because the trajectories move towards it and point Y is not. In addition, since the pendulum is
losing speed, point X is an attractor.
Lyapunov
exponents
We
have
talked about the different ways a system can potentially move towards
stability
but what do we do when we want to know how chaotic the system is? A Lyapunov exponent can tell us how
chaotic a system is by merely quantifying the degree of and
characterizing the
extent of the sensitivity to initial conditions. It
is a numerical value that captures the rate of entropy
for a given topological representation of the data (the steepness of an
attractor
or repeller). To identify a
Lyapunov exponent, we need to identify the change that occurs just off
the set
point. There is a
whole spectrum of Lyapunov exponents and the number of them is equal to
the
number of dimensions in the phase space (e.g. if we are studying a
system in 4
dimensions, there will be 4 Lyapunov exponents).